[공중항법] Inertial navigation system 관성항법시스템
- 항공/공중항법
- 2024. 6. 3. 17:57
INS (Inertial Navigation System)
Inertial Navigation System (INS)는 지리적 위치, 속도 & 방향을 계산하는 자립형 항법 시스템을 의미합니다. INS는 외부 입력 없이 항공기, 선박, 잠수함, 로켓, 우주선 등.과 같은 이동체의 위치와 방향을 추적하는데 사용됩니다.
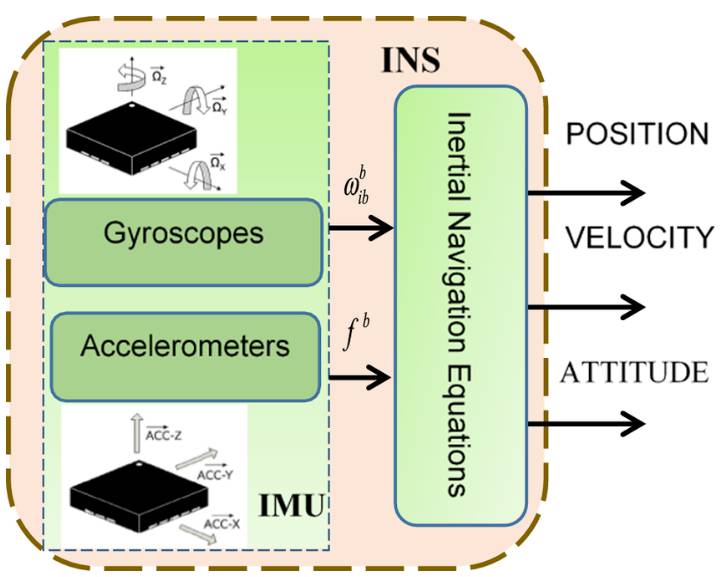
INS는 주로 가속도계와 자이로스코프를 사용하여 "가속도"와 "각속도"를 측정합니다. 이러한 측정값을 토대로 시간에 따라 적분하여 이동체의 현재 및 예상 위치, 속도 및 방향을 계산하게 됩니다.
- 가속도계: 선형 가속도를 측정합니다. 이동체가 얼마나 빠르게 속도가 변화하는지 알려줍니다.
- 자이로스코프: 각속도를 측정합니다. 이동체가 회전하는 속도를 알려줍니다.
- 중앙제어컴퓨터: 가속도계와 자이로스코프의 데이터를 처리하여 위치, 속도 및 방향을 계산합니다.
INS의 장점은 자립성과 응답성이 빠르다는 것입니다.
- 자립성: 외부 신호에 의존하지 않기에 GNSS 위성항법시스템과 같은 외부 시스템이 지원하지 않는 환경에서도 사용이 가능합니다.
- 고속 응답성: 즉각적인 데이터 처리가 가능하기에 빠른 속도와 높은 응답성을 제공합니다.
하지만 INS의 치명적인 단점은 "시간"입니다. 이를 "Drift Rate (표류율)"이라 부르는데 시간이 지남에 따라 누적 오차가 발생한다는 것입니다. 가속도와 각속도 측정에서 작은 오류가 생겨나는데 이것이 시간이 지날수록 점점 더 큰 속도 오류로 커지게 되고 나중에는 위치 오류가 발생될 수 있다는 것입니다. 이를 보완하기 위해 GNSS 위성항법시스템과 결합하여 하이브리드로 사용하는 경우가 많아졌습니다.
IMU (Inertial Measurement Unit)

IMU는 가속도계와 자이로스코프, 자력계를 통틀어서 말하는 "장치"를 말합니다. 앞서 말한 저 세가지 센서들이 하나의 장치로 합쳐져 있습니다.
IMU는 가속도와 각속도를 측정하는 일종의 장치일 뿐입니다. 자체적으로 위치, 속도, 방향을 계산하지 않습니다. 이것은 컴퓨터가 하는 역할이지요. IMU에 중앙제어컴퓨터를 추가한다면 그것이 INS가 됩니다.
IMU = 가속도 + 자이로스코프
IMMU(Inertial & Magnetic Measurement Unit) = 가속도 + 자이로스코프 + 자력계
INS = [IMU] + 중앙제어컴퓨터
INS는 IMU에서 얻은 가속도와 각속도 데이터를 시간에 따라 적분하여 이동체의 현재 상태를 계산합니다. 결과적으로 계산할 능력이 있냐 없냐에 따라 INS인지 IMU인지 결정됩니다. 순수 값만 출력한다면 그건 IMU에 불과하고 이 값들을 토대로 계산한다면 그것은 INS가 되는 겁니다.
#INS, #IMU, #Inertial Navigation System, #Inertial Measurement Unit, #관성항법장치